Our 2019 Competition Subs
Heroes of the Iliad Odysseus & Ajax

CUAUV pioneered the RoboSub competition in 2016 by building not one but two subs, Thor and Loki. We continue this proud tradition with our brand new vehicles Odysseus and Ajax. Odysseus and Ajax will debut at AUSI's RoboSub 2019 Competition in San Diego, CA this summer.
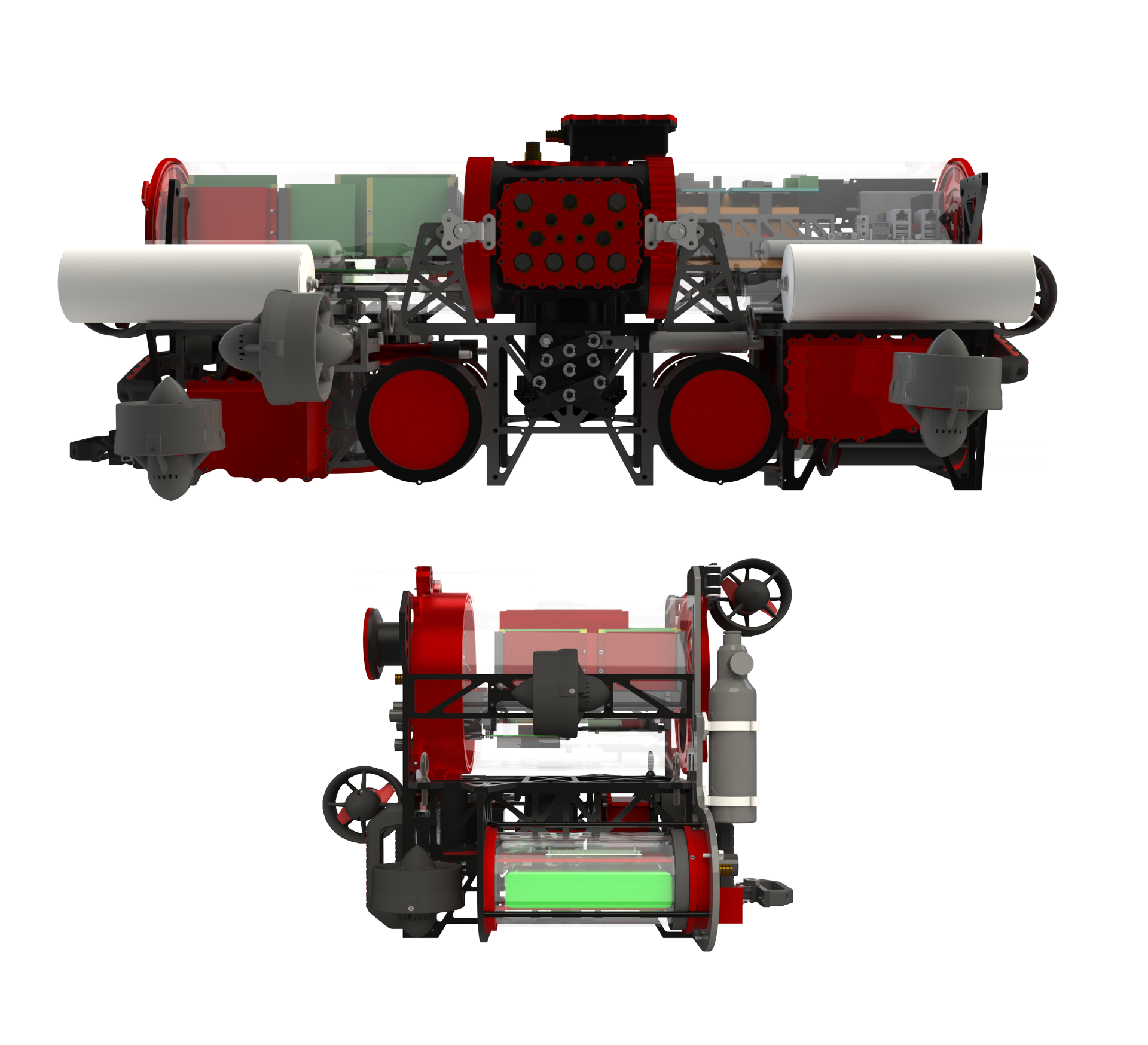
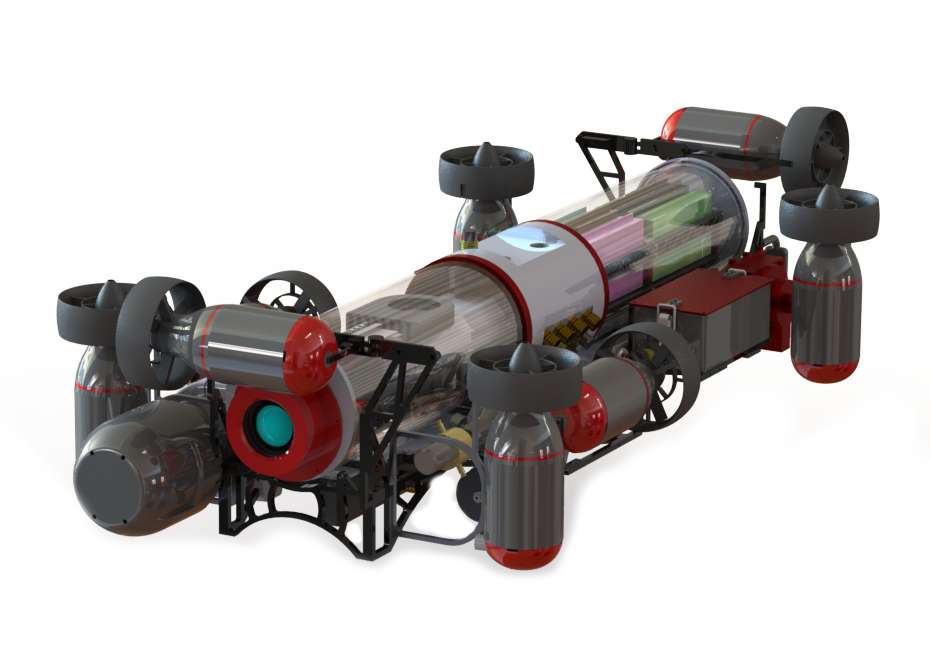
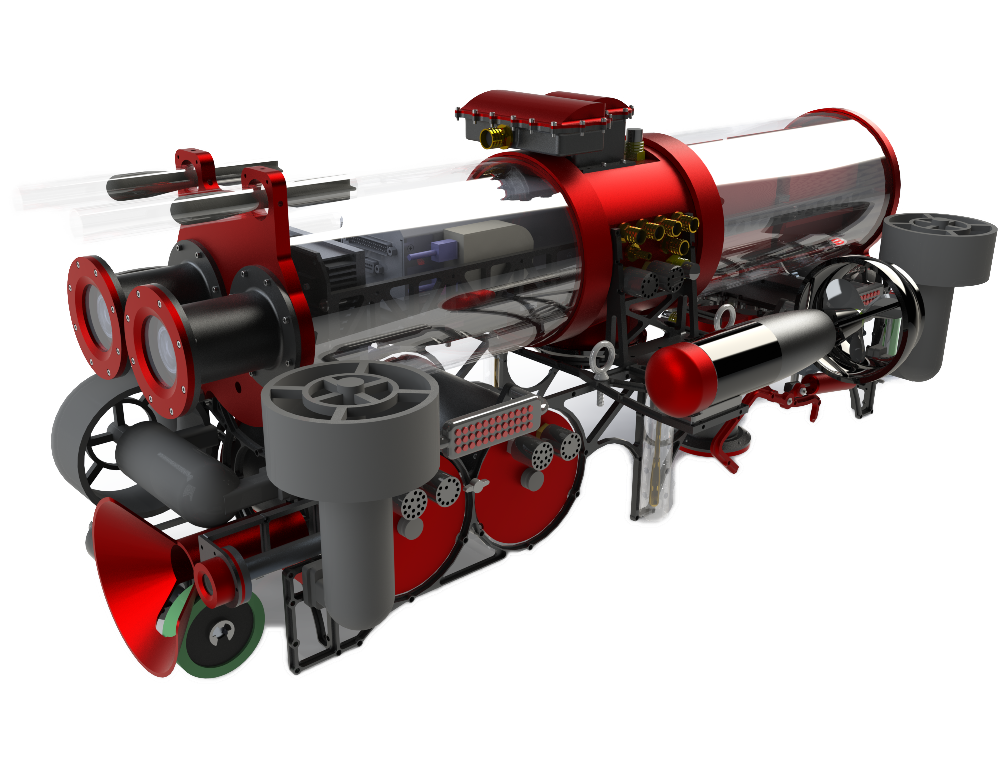
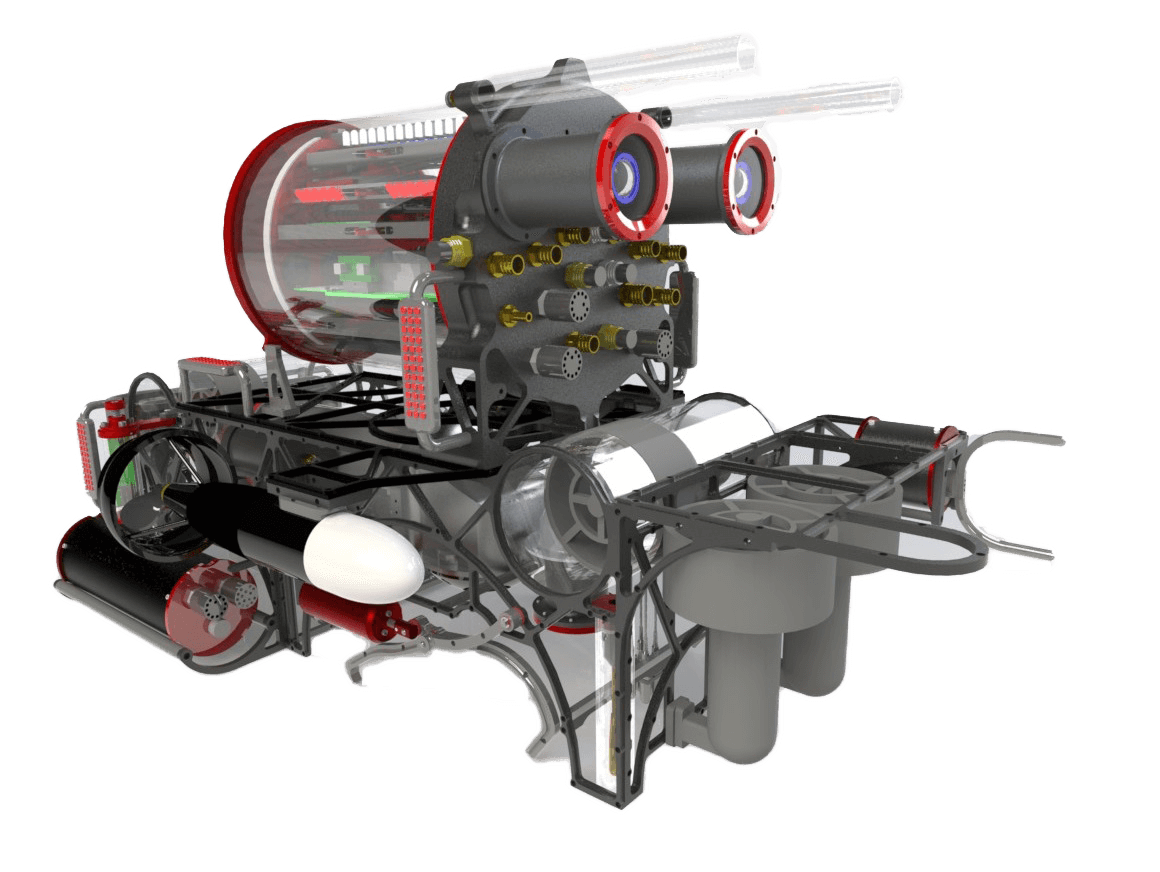
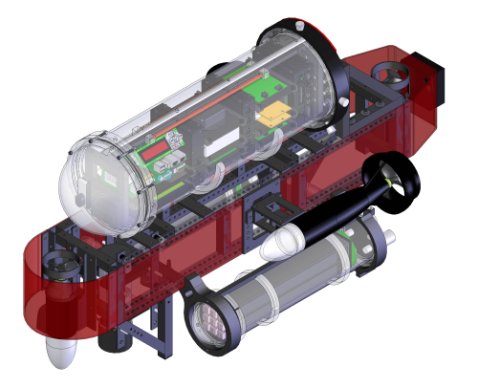
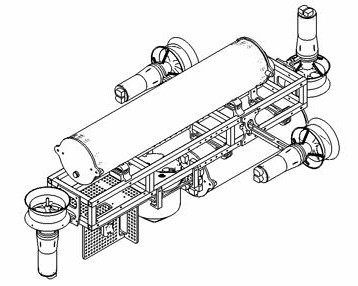
Odysseus takes after the designs of Thor, Artemis, and Castor while featuring a new, roomier main enclosure with more space for electrical boards and a diagnostic LCD screen. Outside of its enclosures Odysseus features more dynamic mounts than ever before, with swinging brackets and flexible 3D printed clips allowing for maximized use of valuable space around the vehicle.
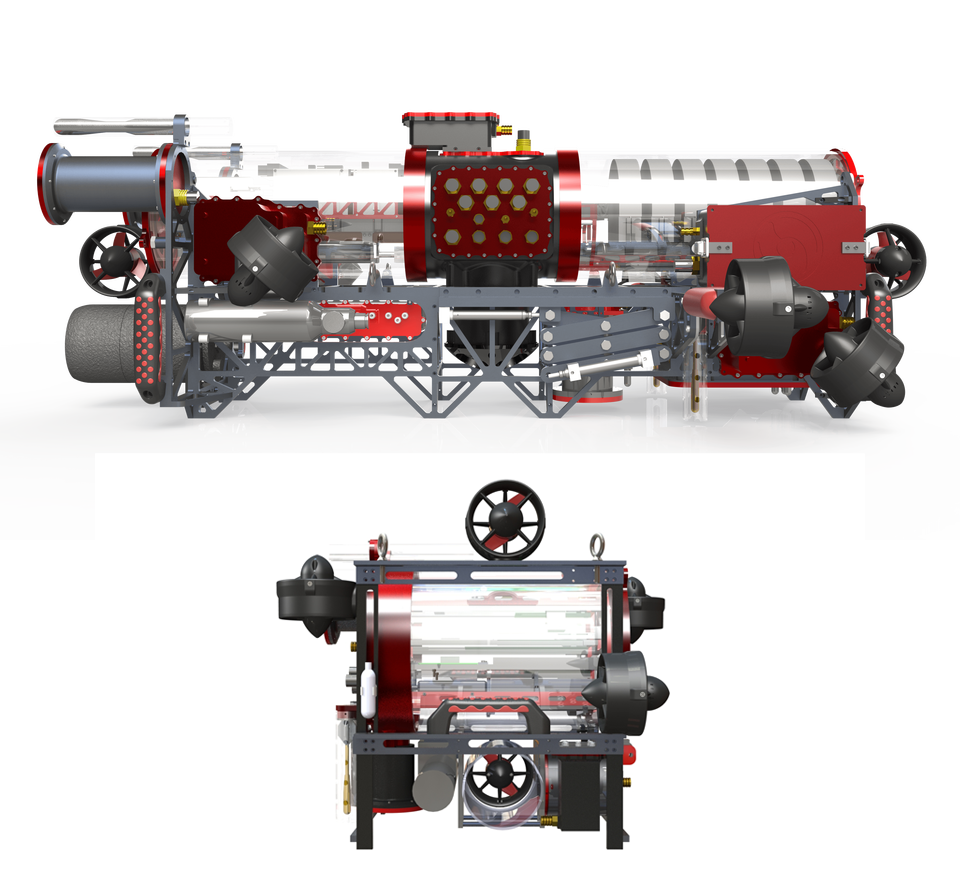
Meanwhile, Ajax is a spiritual successor to Pollux and is our first minisub to feature a fully functional pneumatic system to deploy our newly redesigned torpedo and dropper systems.
A Tradition of Excellence Our Past Subs

2018
Castor & Pollux
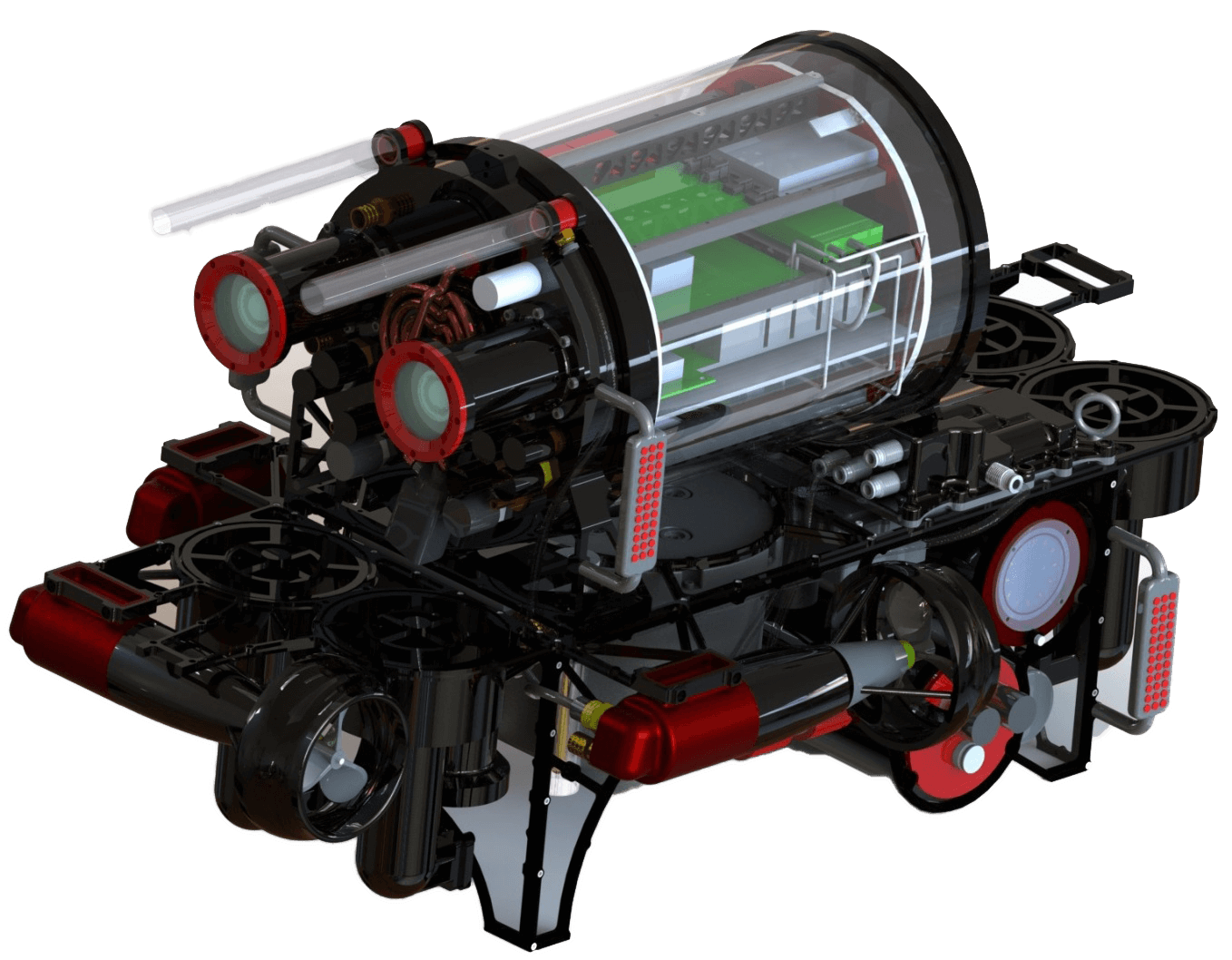
Castor and Pollux were the next evolutionary step of AUV technology. The move to a Nvidia Jetson computer system allowed our computer programs to run faster and more efficiently in a more compact form-factor while a new communication protocol enabled both better SLAM navigation and sub-to-sub communication. A complete revamping of the subs' hydrophones tracking system and an FPGA-based controller that determined the location of underwater pingers were also included. Meanwhile, a new DVL allowed Castor to be a third smaller than our previous main sub. At the same time Pollux was upgraded to feature 8 thrusters, a full hydrophone system, and passive manipulators, even in the smallest minisub hull CUAUV has ever designed.
2017
Artemis & Apollo
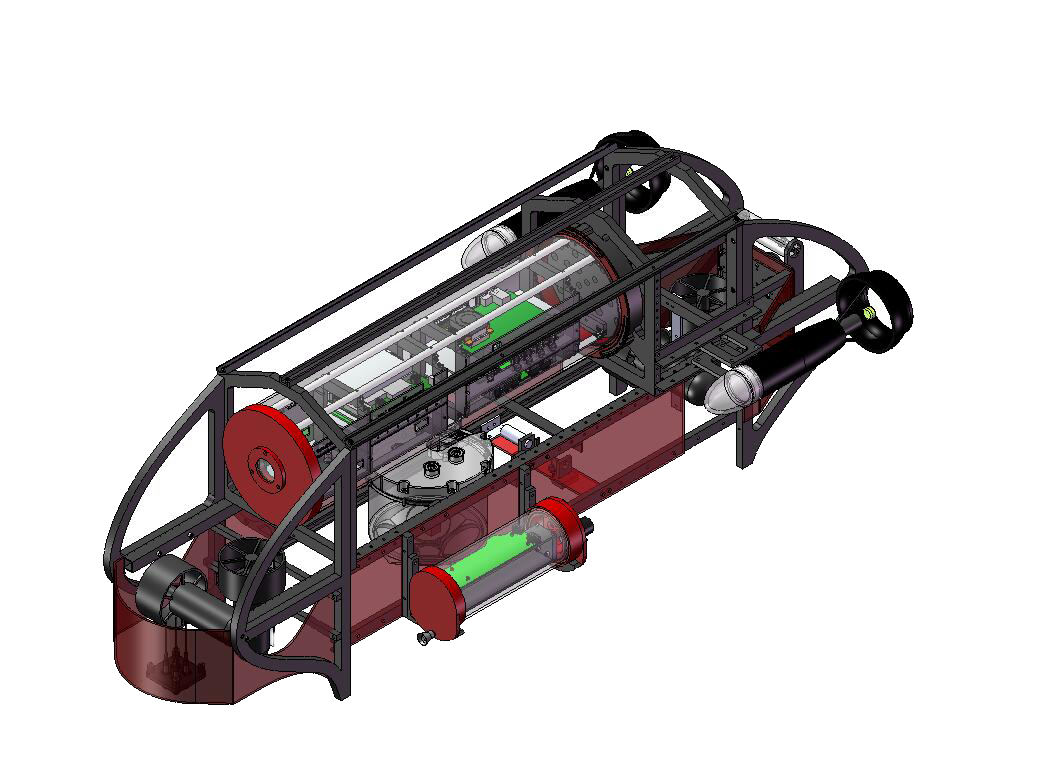
Artemis & Apollo continued on lessons learned from Thor & Loki. Artemis features numerous improvements that make it easier to maneuver and swap parts, such as real time dynamic thrust vectoring, a modular quick-Access PCB backplane, modular hot-swappable battery pods, and modular bulkhead panels.
Apollo features a dual inertial sensor fusion, CO2 pneumatically fired torpedoes, modular hot-swappable battery pods, and can have communicate accoustically with Artemis.
2016
Thor & Loki
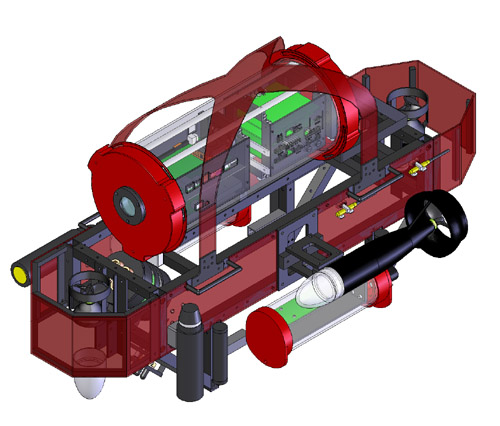
Thor has a mechanical design that implemented ideas from previous double-hull and single-hull AUV designs. Thor introduces vectored thrusters that can be dynamically repositioned to maximize vehicle speed and maneuverability. It also has sliding electronics racks which allow for better access to the bulkheads and easier electrical integration.
This is Loki. Together, Thor and Loki worked in tandem to complete the RoboSub course faster than ever before. Due to Loki’s compact size, we had to rethink the way our AUVs are designed. Loki features a hot swappable battery inside of a single hull design along with a CO2 cartridge actuator system.
2015
Argo
CUAUV is proud to present Argo, its 2015 vehicle. Argo improves upon its predecessor in every aspect of its development, with more flexible electrical systems, enhanced user interfaces, and new double hull design to decrease overall size and weight.
2014
Gemini
Gemini is CUAUV's 2013-2014 vehicle, a joint competition and research vehicle. The design focuses on reducing the weight of the vehicle platform while maintaining full competition capabilities, ease of integration and use, and improved control properties. The main improvements include stronger frame structures and pressure vessels, a streamlined electronics system, improved sensor suite, and improved vision algorithms.
2013
Ragnarök
Ragnarök is the CUAUV 2012-2013 vehicle, a joint competition and research vehicle. The design focuses on reducing the weight of the vehicle platform while maintaining full competition capabilities, ease of integration and use, control properties, and backwards compatibility. The main improvements include stronger frame structures and pressure vessels, a streamlined electronics system, improved sensor suite, and improved vision algorithms.
2012
Killick
Killick is the CUAUV 2011-2012 vehicle, a joint competition and research vehicle. The design focuses on reducing the size and weight of the vehicle platform while maintaining full competition capabilities and control properties. The main improvements include stronger frame structures and pressure vessels, a streamlined electronics system, improved sensor suite, and improved vision algorithms.

2011
Drekar
Drekar is the CUAUV 2010-2011 vehicle, a joint competition and research vehicle. The design focuses on reducing the size and weight of the vehicle platform while maintaining full competition capabilities and control properties. The main improvements include stronger frame structures and pressure vessels, a streamlined electronics system, improved sensor suite, and improved vision algorithms.

2010
Tachyon
Tachyon is CUAUV’s 2009-2010 vehicle, designed using much of what we learned from our previous vehicles with many new innovations that improve vehicle performance. Tachyon was designed to be a joint competition and research vehicle, with an expanded payload area and better control characteristics.
2009
Nova
Nova is the next generation of CUAUV submarines. Expandable and capable of both close in maneuvering and long range sensing missions, it is a transition vehicle between competition missions and CUAUV's new research based open water focus.
2008
Triton
The Triton AUV is CUAUV's 2007-2008 littoral hovering AUV. The new vehicle borrows heavily from the successful elements of the Proteus AUV, as well as certain elements from the Seamonkey class vehicle. The main electronics are contained in a single clear acrylic hull. To improve maintainability the hull may be removed from the electronics rack without disconnecting any of the electronics. The endcaps are made out of aluminum for superior thermal performance.
2007
Proteus
CUAUV’s 2007 competition vehicle is named Proteus. Proteus is the mythological son of the Greek god of the sea, Poseidon, also commonly referred to as the old man of the sea. He is famous for his ability to change shape – a perfect symbol for our new vehicle which has morphed from the SeaMonkey into a sleek and even more reliable new model. Proteus is a 40" long x 20" tall vehicle that will have the ability to autonomously complete tasks under water. The vehicle is smaller, lighter, faster, and more efficient than any of the team’s previous vehicles. The new design is able to balance functionality and performance. The two bottom pods are designed as battery hulls that can easily be removed from the vehicle, even while the vehicle is up and running. This new battery design will not interrupt onboard electronic operations, which will allow the team to remove one battery while the vehicle runs on the other.
2006
Seamonkey
Seamonkey was CUAUV's 5th generation vehicle. To date, it was the most versatile vehicle and well suited as a platform for developmental research and lake deployment. The central frame provides easy access for mounting sensors and any other payload. The larger top hull houses the vehicle electronics, while the bottom hull contains the vehicle's batteries and motor controllers. The combination of relatively high buoyancy on the top hull and greater weight on the bottom hull gives the vehicle an excellent static stability on the pitch and roll axes.